电力供应稳定关乎国计民生,传统人工定期巡视的电力运维模式却弊病丛生。关键设备专人24小时值守、人员安全隐患、数据智能化缺失,运维工作繁琐重复,变革迫在眉睫。

一、传统巡检主要问题
1、巡检工作量大:设备数量繁多、巡检内容要求准确,人员巡检难以长期按照实际巡检巡查的业务需求进行全面运维覆盖。
2、缺少提前预测:此类场所往往缺少人员实时值守,缺少提前预测功能,只有在异常发生后,业务人员才能“事后响应”,从而部分酿成事故。
3、缺乏统一调度:电站巡检工作大部分都依靠人工进行定时检查、驻点值守,但人工巡检无法收集全面有效的数据。设备温度是否正常、汇控柜指示灯是否正常、设备压力表、电流表数字是否正常、开光状态是否正常等,若不能及时发现问题进行处理引起更大的问题,直接或间接造成较大的经济损失。
二、四足巡检机器人
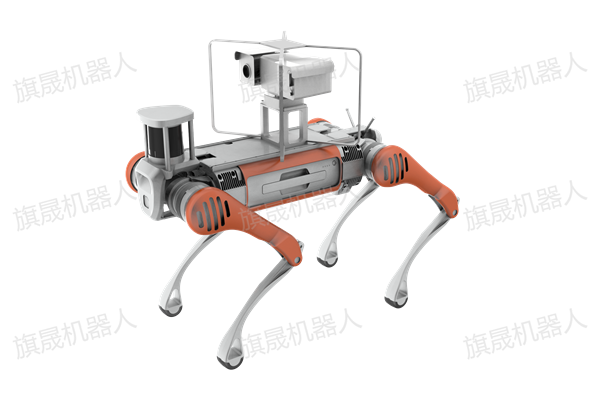
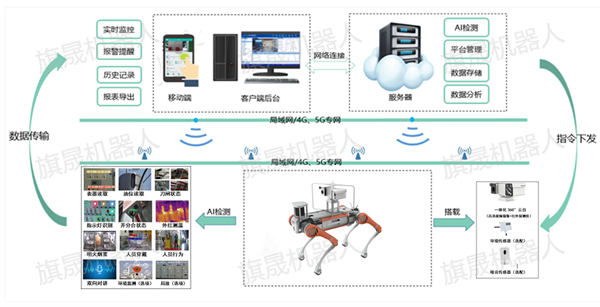
旗晟四足巡检机器人通过高度智能的机器人技术和图像识别等技术,代替人工完成特殊环境下设备运行状态的检测诊断,实现设备区域全覆盖巡视,具有巡检、环境监测、图像识别等多种功能。辅助人工甚至替代人工对设备和当前环境进行检测。有效的减轻工作人员的劳动强度,避免因人员疏忽、漏检等带来的损失,同时降低由生产运行人员整体素质差异而导致的安全生产运行风险。适用于电力场景诸如开关室、配电间、升压站、机房、继保室、汇集站。
三、四足巡检机器人优势
1、机器人巡视可提高机器人智能化水平,为传统巡检方式提供新方案;
2、大数据存储,历史数据便于查询;
3、接口开放,第三方平台及智慧管理系统融合。
4、智能分析,智能分析数据并提取巡视设备关键信息;
5、自动采集,所有传感器数据实时自主采集数据,实时回传、生成巡视报告;
6、及时预警,故障第一时间预警或发现设备安全隐患,提醒工作人员进行问题处理。
7、手自动无缝接切换,工作人员可随时接管机器人;
8、音视频实时交互,工作人员可随时监控机器人端状况;
9、巡视数据直观显示,后台人员快速掌握现场情况;
四、四足巡检机器人功能
1、智能巡检:四足巡检机器人支持定时、定点、指定任务临时及遥控巡检。定点巡检可按预设路径和目标点自动匀速进行,自动记录数据。
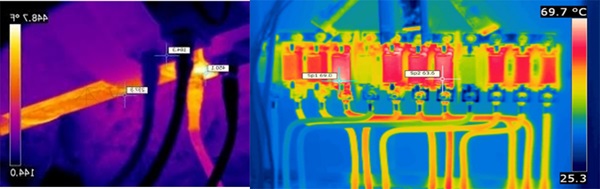
2、检测功能:机器人配可见光摄像机、红外热成像仪和拾音器,可增配温湿度等设备。能远程控制移动、云台转动,拍摄图像和热成像,实时传至主控室,便于判断设备状态。巡检时自动记录采集信息
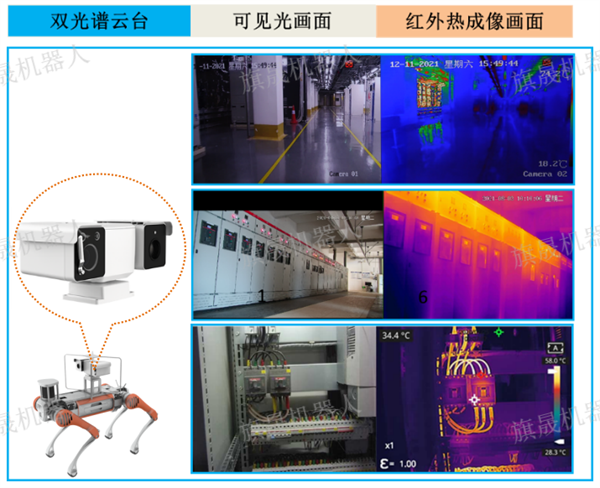
3、测温功能:用电高峰和高温季,机器人用红外热像仪测设备接头温度,超设定值报警。传感器测温范围-20℃~350℃,精度±2℃,载流换算精度±10℃,可覆盖全变电站设备,提升测温灵活性
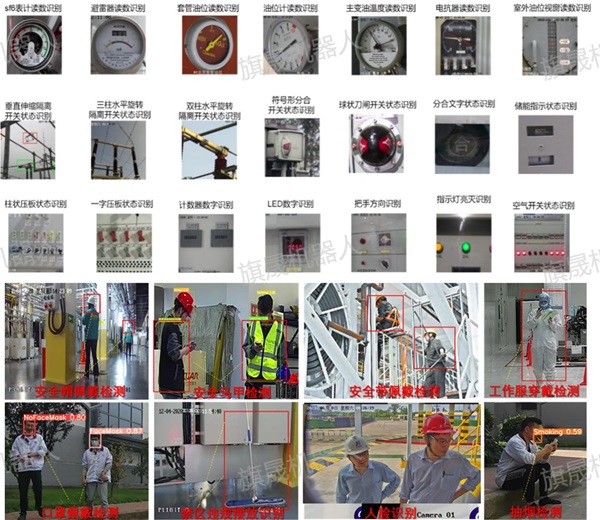
4、机器视觉识别:可读取表盘数据,监测开关位置,自动记录、判断并报警。
5、双向语音对讲:机器人与远程集控后台通过网络实现远程语音对讲,方便运维指导。
6、报警功能:摄像头识别仪表读数,超范围声光报警并上传。可设高温报警值,超限时报警,存储信息供事故处理。
7、报表功能:机器人回传巡检信息,管理软件按不同字段生成报表,以多种形式分析,助于判断设备运行和预测性能。
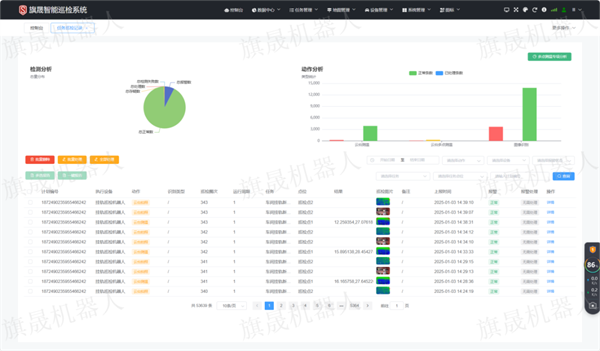
五、智能巡检系统
巡检监控主要实现四足巡检机器人巡检运行的实时监控功能,包括巡检任务信息、巡检地图、实时视频、巡检结果、巡检告警,四足巡检机器人控制等内容,三维巡视主要利用可视化技术进行设备巡检,结合了自动巡检和手动巡检两种模式,通过视频展示电房内的设备状态,实现全面、直观、高效的监控和管理。