某电站受制于地理位置500kV和220kV开关站远离值班室,相关巡检消耗人力成本高,巡检及时性不能满足,并且恶劣天气不能保证及时巡检,常规巡检方式存在巡检效率低、人力成本高、巡检质量不稳定、缺乏实时监测和追踪、工作环境限制等不足之处。旗晟智能化四足巡检机器人具有提高巡检效率、减少人力成本、提高巡检质量稳定性、提高安全性、实时监测和数据收集以及克服环境限制等优点,能及时发现安全隐患,保证电站电源安全。

一、场景需求描述
现场为室内户外场景,巡检2处开关站。场景监测内容:
各类仪表、油位计、显示板的数值读取,柜体指示灯识别;
各类分合、开合、刀闸的状态识别;
电器设备、高压电缆等测温,明火烟雾监测;
设备外观拍照,表面破损、泄漏等识别;
站内环境气体、温度检测(选项)
二、四足巡检机器人介绍
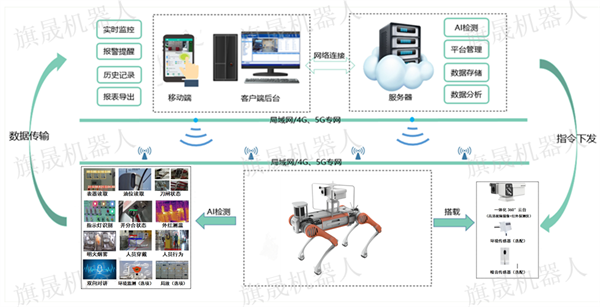
整个智能巡检系统主要由机器人本体、充电系统、通信网络系统、机器人控制系统、巡检平台软件系统构成。通信网络系统依场地实际设计安装,全面覆盖待巡检区域,供机器人接入巡检。机器人本体搭载高清可见光摄像机、红外热成像仪及可选的环境与气体传感器,执行读数记录、状态识别、温湿度检测及局部环境监测。软件系统基于机器人内置高性能服务器,采用模块化分层设计,接口完备。后台控制室服务器负责状态监控、任务调度等业务逻辑处理。客户端采用B/S架构,实现跨平台交互并提供外部数据接口。充电系统提供自主充电设备,通信网络系统保障数据传输。
2.1四足巡检机器人标准
自主巡检:具备自主导航、路径规划和避障能力
数据采集:实时监测环境参数并记录数据
远程监控:支持手机和电脑远程查看巡检状态及数据
移动方式:四足式,适应不同地形
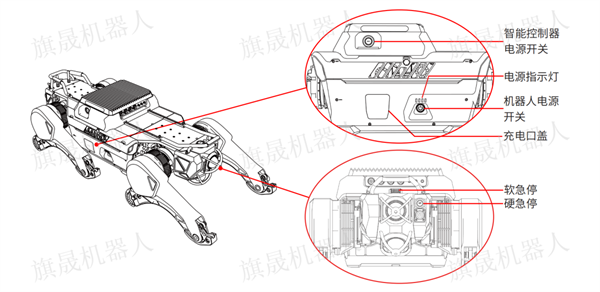
2.2四足机器人参数
站立尺寸:≦1098×450×645mm
折叠尺寸:≦880×460×330mm
重量:≦65kg
续航能力:4~6h
续航耐力:空载行走>5h,里程>20km
负重20kg步行>4h,里程>15km
负载(站立):最大120kg
负载(行走):>40kg
连续爬楼梯:20~25cm的楼梯
攀爬能力:向前爬上和爬下40cm的台阶
工作温度:-20℃~55℃
爬坡角度:>45°
奔跑速度:>6m/s(可调)
跳跃宽度:0.5~1.2m
最大跳跃距离:>1.6m
防护等级:IP67
三、机器人功能
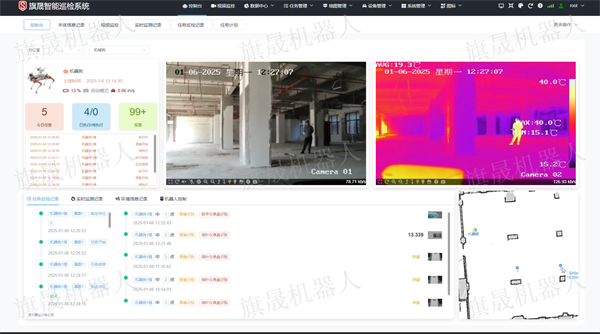
1、智能巡检:四足巡检机器人支持定时、定点、指定任务临时及遥控巡检。定点巡检可按预设路径和目标点自动匀速进行,自动记录数据。
2、检测功能:机器人配可见光摄像机、红外热成像仪和拾音器,可增配温湿度等设备。能远程控制移动、云台转动,拍摄图像和热成像,实时传至主控室,便于判断设备状态。巡检时自动记录采集信息
3、测温功能:用电高峰和高温季,机器人用红外热像仪测设备接头温度,超设定值报警。传感器测温范围-20℃~350℃,精度±2℃,载流换算精度±10℃,可覆盖全变电站设备,提升测温灵活性
4、机器视觉识别:可读取表盘数据,监测开关位置,自动记录、判断并报警。
5、双向语音对讲:机器人与远程集控后台通过网络实现远程语音对讲,方便运维指导。
6、报警功能:摄像头识别仪表读数,超范围声光报警并上传。可设高温报警值,超限时报警,存储信息供事故处理。
7、报表功能:机器人回传巡检信息,管理软件按不同字段生成报表,以多种形式分析,助于判断设备运行和预测性能。
四、智能巡检系统
巡检监控主要实现四足巡检机器人巡检运行的实时监控功能,包括巡检任务信息、巡检地图、实时视频、巡检结果、巡检告警,四足巡检机器人控制等内容,三维巡视主要利用可视化技术进行设备巡检,结合了自动巡检和手动巡检两种模式,通过视频展示电房内的设备状态,实现全面、直观、高效的监控和管理。
旗晟智能化四足巡检机器人在电站升压站的应用,有效解决了传统巡检效率低、成本高、质量不稳定等问题。通过自主导航、实时监测和远程控制,机器人提升了巡检的及时性和准确性,尤其在恶劣环境下表现出色,保障了设备安全运行。其数据采集和分析功能为设备运维提供了有力支持,降低了故障率和维护成本。未来,随着技术发展,四足巡检机器人将在更多工业场景中发挥重要作用,推动电力行业向智能化、自动化转型。这一成功应用为行业树立了标杆,提供了宝贵经验。